CAN
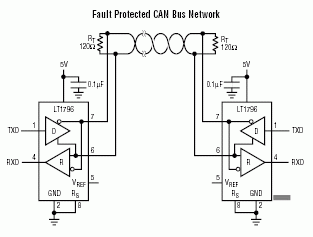
Controller Area Network (CAN) bus is a serial communication protocol with built-in error checking and retransmission. It is generally a two wire bus, but other transceivers with one wire or LSFT (Low Speed Fault Tolerant) are used.
The common high-speed two-wire CAN requires termination resistors at the end of the wires, typically 120 ohm.
Tip
Some CAN devices, including our own development boards, have built in termination resistors.
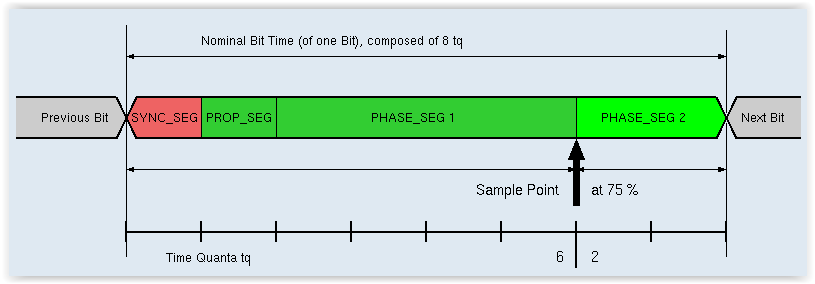
CAN bit timing is a complex topic that requires considerable knowledge of the CAN protocol. All nodes on a CAN network must use the same baud rate. Sample bit timing settings are provided further down on this page to help you get started.
SetNominalBitTiming() and SetDataBitTiming() define the CAN bus timing using the arguments listed below. Note that SetDataBitTiming() is only used for CAN-FD to specify the faster data rate. SetNominalBitTiming() is used both for standard CAN and to define the slower data bit rate for CAN-FD.
Tip
The propagationPhase1 argument combines the propagation and phase1 CAN timing parameters.
| Baud | Propagation+Phase1 | Phase2 | Baudrate Prescaler | Synchronization Jump Width | Use Multi Bit Sampling | Sample Point | Max Osc. Tolerance | Max Cable Length |
|---|---|---|---|---|---|---|---|---|
| 33.333K | 13 | 2 | 90 | 1 | False | 87.5% | 0.31% | 2200M |
| 83.333K | 13 | 2 | 36 | 1 | False | 87.5% | 0.31% | 850M |
| 125K | 13 | 2 | 24 | 1 | False | 87.5% | 0.31% | 550M |
| 250K | 13 | 2 | 12 | 1 | False | 87.5% | 0.31% | 250M |
| 500K | 13 | 2 | 6 | 1 | False | 87.5% | 0.31% | 100M |
| 1M | 13 | 2 | 3 | 1 | False | 87.5% | 0.31% | 40M |
Note
The table above is calculated base on 40MHz clock source.
There are many online CAN calculators that can be used to help you with CAN timing, for example.
The CAN calculator needs the microcontroller's CAN clock speed. For the SITCore series SC20xxx, this is 48 MHz. For the SC13xxx the speed is 40MHz. These can easily be found with SourceClock property.
Filtering
Filters can be set to automatically accept or ignore messages based on their arbitration ID.
Tip
On SC20xxx, each CAN channel supports up to 64 standard IDs and 32 Extended IDs. SC13xxx supports up to 14 filters.
Range Filter
AddRangeFilter() allows you to set a range of arbitration IDs that will be accepted as valid messages. Messages with arbitration IDs outside of this range will be ignored. You can add more than one range filter. In the sample code below, the range filters will accept messages with arbitration IDs ranging from 0x12 to 0x20 and also between 0x500 and 0x1000 inclusive.
Note
Only SC20xxx supports Range Filter, SC13xxx doesn't.
Mask Filter
AddMaskFilter() can be used to specify an individual arbitration ID or a range of arbitration IDs that will be accepted regardless of the group filter settings. If the arbitration ID of the message is bitwise anded with the given mask argument, and the result is equal to the compare argument you provide, the message will be accepted.
In the sample code below, CAN messages with arbitration IDs of 0x11, 0x13, and 0x5678 will be accepted in addition to the arbitration IDs specified by the group filters.
Sample Code
Tip
Needed NuGets: GHIElectronics.TinyCLR.Core, GHIElectronics.TinyCLR.Devices and GHIElectronics.TinyCLR.Pins
using GHIElectronics.TinyCLR.Devices.Can;
using GHIElectronics.TinyCLR.Devices.Gpio;
using GHIElectronics.TinyCLR.Pins;
using System;
using System.Diagnostics;
using System.Threading;
var LdrButton = GpioController.GetDefault().OpenPin(SC20100.GpioPin.PE3);
LdrButton.SetDriveMode(GpioPinDriveMode.InputPullUp);
var can = CanController.FromName(SC20100.CanBus.Can1);
var propagationPhase1 = 13;
var phase2 = 2;
var baudratePrescaler = 3;
var synchronizationJumpWidth = 1;
var useMultiBitSampling = false;
can.SetNominalBitTiming(new CanBitTiming(propagationPhase1, phase2, baudratePrescaler,
synchronizationJumpWidth, useMultiBitSampling));
var message = new CanMessage() {
Data = new byte[] { 0x48, 0x65, 0x6C, 0x6C, 0x6F, 0x2E, 0x20, 0x20 },
ArbitrationId = 0x11,
Length = 6,
RemoteTransmissionRequest = false,
ExtendedId = false,
FdCan = false,
BitRateSwitch = false
};
//The following filter will accept arbitration IDs from 0x12 to 0x20 inclusive.
can.Filter.AddRangeFilter(Filter.IdType.Standard, 0x12, 0x20);
//The following filter will accept arbitration IDs from 0x500 to 0x1000 inclusive.
can.Filter.AddRangeFilter(Filter.IdType.Standard, 0x500, 0x1000);
//The following filter will accept arbitration IDs of 0x11 and 0x13.
can.Filter.AddMaskFilter(Filter.IdType.Standard, 0x11, 0xFD);
//The following filter will accept arbitration IDs of 5678 only.
can.Filter.AddMaskFilter(Filter.IdType.Standard, 0x5678, 0xFFFF);
can.MessageReceived += Can_MessageReceived;
can.ErrorReceived += Can_ErrorReceived;
can.Enable();
while (true) {
if (LdrButton.Read() == GpioPinValue.Low)
can.WriteMessage(message);
Thread.Sleep(100);
}
void Can_MessageReceived(CanController sender,
MessageReceivedEventArgs e) {
sender.ReadMessage(out var message);
Debug.WriteLine("Arbitration ID: 0x" + message.ArbitrationId.ToString("X8"));
Debug.WriteLine("Is extended ID: " + message.ExtendedId.ToString());
Debug.WriteLine("Is remote transmission request: "
+ message.RemoteTransmissionRequest.ToString());
Debug.WriteLine("Time stamp: " + message.Timestamp.ToString());
var data = "";
for (var i = 0; i < message.Length; i++) data += Convert.ToChar(message.Data[i]);
Debug.WriteLine("Data: " + data);
}
void Can_ErrorReceived(CanController sender, ErrorReceivedEventArgs e)
=> Debug.WriteLine("Error " + e.ToString());
CAN-FD
CAN-FD allows for faster data transmission and larger data packet size to increase throughput. At the same time, CAN-FD is compatible with traditional CAN -- CAN-FD and standard CAN nodes can even coexist on the same CAN bus!
CAN-FD can be used by setting the FdCan property of your CAN message to true. This setting will allow you to send up to 64 bytes of data per CAN message.
To send the data at higher speed you will also need to set two bit timings, one for the normal, slower speed (SetNominalBitTiming()), and one for the faster speed (SetDataBitTiming()). You will also have to set the BitRateSwitch property of the CAN message to true.
The following code shows the changes needed to make the above code sample use CAN-FD with speeds of 250 kilobaud and 1 megabaud.
Note
Only SC20xxx supports CAN-FD, SC13xxx doesn't support this feature.
var propagationPhase1 = 13; //250 kilobaud settings
var phase2 = 2;
var baudratePrescaler = 12;
var synchronizationJumpWidth = 1;
var useMultiBitSampling = false;
//Set the lower CAN speed to 250 kilobaud.
can.SetNominalBitTiming(new CanBitTiming(propagationPhase1, phase2, baudratePrescaler,
synchronizationJumpWidth, useMultiBitSampling));
baudratePrescaler = 3; //Change bit timing to 1 megabaud.
//Set faster CAN speed to 1 megabaud.
can.SetDataBitTiming(new CanBitTiming(propagationPhase1, phase2, baudratePrescaler,
synchronizationJumpWidth, useMultiBitSampling));
can.Enable();
var message = new CanMessage() {
Data = new byte[] { 0x48, 0x65, 0x6C, 0x6C, 0x6F, 0x2E, 0x20, 0x20 },
ArbitrationId = 0x11,
Length = 6,
RemoteTransmissionRequest = false,
ExtendedId = false,
FdCan = true,
BitRateSwitch = true
};